The prevailing practice of capturing and documenting existing building conditions is labor-intensive, prone to inaccuracies, and often results in expensive rework. The surveying and documentation process is hampered by inconsistent surveying methods and a lack of reliable as-built data from outdated and imprecise CAD drawings. Additional costs may arise due to multiple return trips to rectify missed or inconsistent measurements, as well as cost overruns from rework necessitated by incomplete captures of intricate existing conditions. Hosta’s digital capture process provides a superior alternative for obtaining accurate and comprehensive existing conditions data, minimizing labor requirements, saving time, and reducing project risk.
Current Reality Capture Methods:
At present, without utilizing Hosta’s solution, various reality capture scanning methodologies and technologies are based on the following principles:
- Laser triangulation
- Photogrammetry
- Structured light
- Laser pulse-based scanning
- Contact-based scanning
None of these principles are capable of capturing an as-built space in a single scan to create digitized 3D replicas or digital models. All scans must be merged with a common reference alignment to reconstruct the final model, making the scanning pipeline an extensive process.
Traditional Point Cloud to Mesh Conversion Workflow:
Point clouds are a widely-used method for representing 3D data obtained from sources such as 3D scanners or LiDAR sensors. However, point clouds can be challenging to visualize and manipulate directly. Converting them to a mesh can facilitate more effective utilization in various applications. A typical traditional workflow often involves the following steps:
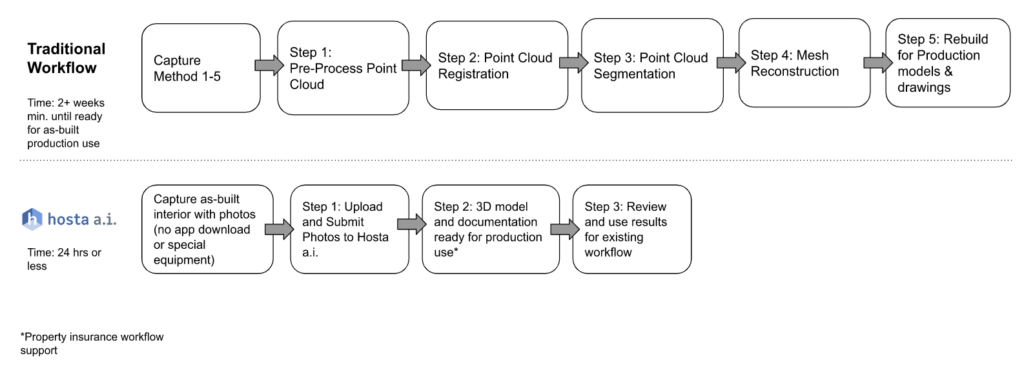
- Pre-processing the Point Cloud: This initial step entails removing noise, outliers, and unwanted data points to ensure an accurate and artifact-free mesh.
- Point Cloud Registration: Aligning point cloud data to a common coordinate system, or registration, involves finding the optimal alignment between the data and a reference coordinate system. Algorithms such as Iterative Closest Point (ICP) are frequently employed for this purpose.
- Point Cloud Segmentation: Segmenting the point cloud data into smaller regions helps identify different objects and surfaces. Various segmentation algorithms, such as Region Growing, are available for this purpose.
- Mesh Reconstruction: The final step is reconstructing the mesh from the segmented point cloud data by connecting points to form triangles that define the mesh’s surface. Several algorithms, including Poisson Surface Reconstruction and Ball Pivoting Algorithm, can be used for mesh reconstruction.
The manual conversion of point clouds to meshes is time-consuming and may not always yield accurate results. Automating this process with Hosta can generate precise and efficient 3D models, floor plans, linear, area, and volume measurements, bill of materials, quantity takeoffs, and more. The steps for producing production-ready digital assets with Hosta are significantly reduced, involving capturing photos of an interior room using a mobile app without the need for specialized hardware training or equipment certifications. The process is streamlined as follows:
- Upload and Submit Photos: Photos can be uploaded and submitted through Hosta’s capture web client or API.
- Wait 24 Hours or Less: Hosta’s AI algorithms will build production-ready digital assets within this timeframe.
- Review Hosta Results: Integrate Hosta’s output seamlessly into your existing workflow.
Conclusion:
Converting point clouds to meshes can be a complex and challenging task. However, Hosta’s innovative, patented reality capture technology simplifies the process of accurately capturing existing conditions, reducing labor requirements, time, and project risks. The result is a set of precise, actionable digital as-built data that can be directly incorporated into your existing workflows.

